nomad-driver-containerd
![]()
![]()
![]()



We are actively looking for contributors and maintainers for this project.
If you have experience in container internals e.g. cgroups, namespaces, or have contributed to any open source projects
around containers e.g. docker, containerd, nerdctl, podman etc or build tooling which involves dealing with
container internals, and are interested in contributing to this project, I would love to talk to you!
Golang experience is preferred but not required.
Please reach out to me @_shishir_m or open an issue in this repository with your contact details, if you are interested in contributing to this project.
Overview
Nomad task driver for launching containers using containerd.
Containerd (containerd.io) is a lightweight container daemon for
running and managing container lifecycle.
Docker daemon also uses containerd.
dockerd (docker daemon) --> containerd --> containerd-shim --> runc
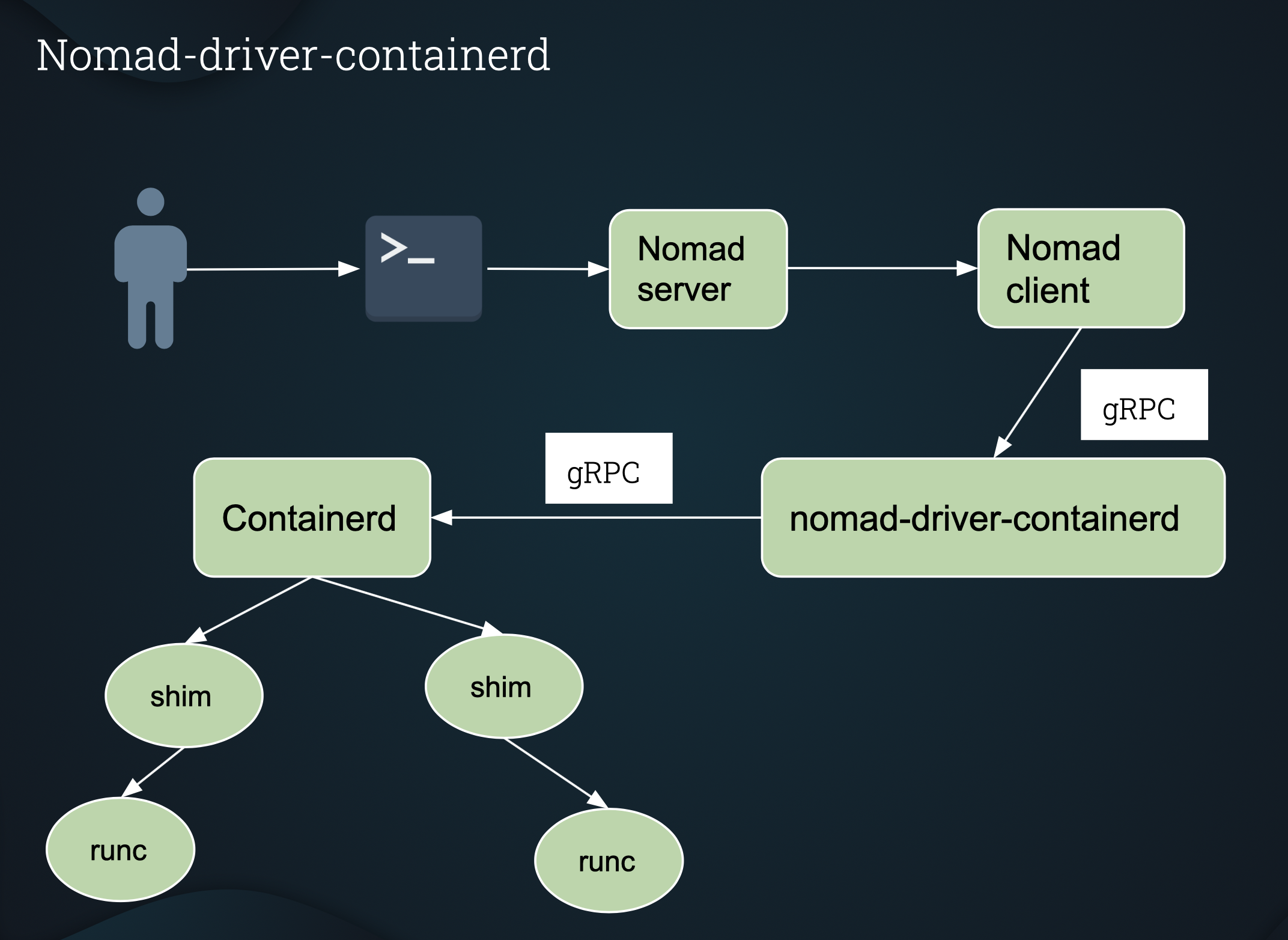
nomad-driver-containerd enables nomad client to launch containers directly using containerd, without docker!
Docker daemon is not required on the host system.
nomad-driver-containerd architecture
Requirements
- Nomad >=v1.0
- Go >=v1.11
- Containerd >=1.3
- Vagrant >=v2.2
- VirtualBox v6.0 (or any version vagrant is compatible with)
Building nomad-driver-containerd
Make sure your $GOPATH is setup correctly.
$ mkdir -p $GOPATH/src/github.com/Roblox
$ cd $GOPATH/src/github.com/Roblox
$ git clone git@github.com:Roblox/nomad-driver-containerd.git
$ cd nomad-driver-containerd
$ make build (This will build your containerd-driver binary)
If you want to compile for arm64, you can run:
make -f Makefile.arm64
Screencast

Wanna try it out!?
$ vagrant up
or vagrant provision if the vagrant VM is already running.
Once setup (vagrant up OR vagrant provision) is complete and the nomad server is up and running, you can check the registered task drivers (which will also show containerd-driver) using:
$ nomad node status (Note down the <node_id>)
$ nomad node status <node_id> | grep containerd-driver
NOTE: setup.sh is part of the vagrant setup and should not be executed directly.
Run Example jobs.
There are few example jobs in the example directory.
$ nomad job run <job_name.nomad>
will launch the job.
More detailed instructions are in the example README.md
To interact with images and containers directly, you can use nerdctl which is a docker compatible CLI for containerd. nerdctl is already installed in the vagrant VM at /usr/local/bin.
Supported Options
Driver Config
| Option | Type | Required | Default | Description |
|---|---|---|---|---|
| enabled | bool | no | true | Enable/Disable task driver. |
| containerd_runtime | string | no | io.containerd.runc.v2 |
Runtime for containerd. |
| stats_interval | string | no | 1s | Interval for collecting TaskStats. |
| allow_privileged | bool | no | true | If set to false, driver will deny running privileged jobs. |
| auth | block | no | N/A | Provide authentication for a private registry. See Authentication for more details. |
Supported Runtimes
Valid options for containerd_runtime (Driver Config).
io.containerd.runc.v1:runcruntime that supports a single container.io.containerd.runc.v2(Default):runcruntime that supports multiple containers per shim.io.containerd.runsc.v1:gVisoris an OCI compliant container runtime which provides better security thanrunc. They achieve this by implementing a user space kernel written in go, which implements a substantial portion of the Linux system call interface. For more details, please check theirofficial documentation
Task Config
| Option | Type | Required | Description |
|---|---|---|---|
| image | string | yes | OCI image (docker is also OCI compatible) for your container. |
| image_pull_timeout | string | no | A time duration that controls how long containerd-driver will wait before cancelling an in-progress pull of the OCI image as specified in image. Defaults to "5m". |
| command | string | no | Command to override command defined in the image. |
| args | []string | no | Arguments to the command. |
| entrypoint | []string | no | A string list overriding the image's entrypoint. |
| cwd | string | no | Specify the current working directory for your container process. If the directory does not exist, one will be created for you. |
| privileged | bool | no | Run container in privileged mode. Your container will have all linux capabilities when running in privileged mode. |
| pids_limit | int64 | no | An integer value that specifies the pid limit for the container. Defaults to unlimited. |
| pid_mode | string | no | host or not set (default). Set to host to share the PID namespace with the host. |
| hostname | string | no | The hostname to assign to the container. When launching more than one of a task (using count) with this option set, every container the task starts will have the same hostname. |
| host_dns | bool | no | Default (true). By default, a container launched using containerd-driver will use host /etc/resolv.conf. This is similar to docker behavior. However, if you don't want to use host DNS, you can turn off this flag by setting host_dns=false. |
| seccomp | bool | no | Enable default seccomp profile. List of allowed syscalls. |
| seccomp_profile | string | no | Path to custom seccomp profile. seccomp must be set to true in order to use seccomp_profile. The default docker seccomp profile found here can be used as a reference, and modified to create a custom seccomp profile. |
| shm_size | string | no | Size of /dev/shm e.g. "128M" if you want 128 MB of /dev/shm. |
| sysctl | map[string]string | no | A key-value map of sysctl configurations to set to the containers on start. |
| readonly_rootfs | bool | no | Container root filesystem will be read-only. |
| runtime | string | no | A string representing a configured runtime to pass to containerd. This is equivalent to the --runtime argument in the docker CLI. |
| host_network | bool | no | Enable host network. This is equivalent to --net=host in docker. |
| extra_hosts | []string | no | A list of hosts, given as host:IP, to be added to /etc/hosts. |
| cap_add | []string | no | Add individual capabilities. |
| cap_drop | []string | no | Drop invidual capabilities. |
| cpuset_cpus | string | no | CPUs in which to allow execution (0-3, 0,1). |
| cpuset_mems | string | no | MEMs in which to allow execution (0-3, 0,1). |
| devices | []string | no | A list of devices to be exposed to the container. |
| auth | block | no | Provide authentication for a private registry. See Authentication for more details. |
| mounts | []block | no | A list of mounts to be mounted in the container. Volume, bind and tmpfs type mounts are supported. fstab style mount options are supported. |
Mount block
{
- type (string) (Optional): Supported values are volume, bind or tmpfs. Default: volume.
- target (string) (Required): Target path in the container.
- source (string) (Optional): Source path on the host.
- options ([]string) (Optional): fstab style mount options. NOTE: For bind mounts, atleast rbind and ro are required.
}
Bind mount example
mounts = [
{
type = "bind"
target = "/target/t1"
source = "/src/s1"
options = ["rbind", "ro"]
}
]
In additon to the mounts option in Task Config, you can also mount your volumes into the container using nomad volume_mount stanza
See example job for volume_mount.
Custom seccomp profile example
The default docker seccomp profile found here
can be downloaded, and modified (by removing/adding syscalls) to create a custom seccomp profile.
The custom seccomp profile can then be saved under /opt/seccomp/seccomp.json on the Nomad client nodes.
A nomad job can be launched using this custom seccomp profile.
config {
seccomp = true
seccomp_profile = "/opt/seccomp/seccomp.json"
}
Sysctl example
config {
sysctl = {
"net.core.somaxconn" = "16384"
"net.ipv4.ip_forward" = "1"
}
}
Authentication (Private registry)
auth stanza allow you to set credentials for your private registry e.g. if you want to pull
an image from a private repository in docker hub.
auth stanza can be set either in Driver Config or Task Config or both.
If set at both places, Task Config auth will take precedence over Driver Config auth.
NOTE: In the below example, user and pass are just placeholder values which need to be replaced by actual username and password, when specifying the credentials. Below auth stanza can be used for both Driver Config and Task Config.
auth {
username = "user"
password = "pass"
}
Networking
nomad-driver-containerd supports host and bridge networks.
NOTE: host and bridge are mutually exclusive options, and only one of them should be used at a time.
-
Host network can be enabled by setting
host_networktotruein task config of the job spec (see underSupported options). -
Bridge network can be enabled by setting the
networkstanza in the task group section of the job spec.
network {
mode = "bridge"
}
You need to install CNI plugins on Nomad client nodes under /opt/cni/bin before you can use bridge networks.
Instructions for installing CNI plugins.
$ curl -L -o cni-plugins.tgz https://github.com/containernetworking/plugins/releases/download/v0.8.6/cni-plugins-linux-amd64-v0.8.6.tgz
$ sudo mkdir -p /opt/cni/bin
$ sudo tar -C /opt/cni/bin -xzf cni-plugins.tgz
Also, ensure your Linux operating system distribution has been configured to allow container traffic through the bridge network to be routed via iptables. These tunables can be set as follows:
$ echo 1 > /proc/sys/net/bridge/bridge-nf-call-arptables
$ echo 1 > /proc/sys/net/bridge/bridge-nf-call-ip6tables
$ echo 1 > /proc/sys/net/bridge/bridge-nf-call-iptables
To preserve these settings on startup of a nomad client node, add a file including the following to /etc/sysctl.d/ or remove the file your Linux distribution puts in that directory.
net.bridge.bridge-nf-call-arptables = 1
net.bridge.bridge-nf-call-ip6tables = 1
net.bridge.bridge-nf-call-iptables = 1
Port forwarding
nomad supports both static and dynamic port mapping.
- Static ports
Static port mapping can be added in the network stanza.
network {
mode = "bridge"
port "lb" {
static = 8889
to = 8889
}
}
Here, host port 8889 is mapped to container port 8889.
NOTE: static ports are usually not recommended, except for system or specialized jobs like load balancers.
- Dynamic ports
Dynamic port mapping is also enabled in the network stanza.
network {
mode = "bridge"
port "http" {
to = 8080
}
}
Here, nomad will allocate a dynamic port on the host and that port will be mapped to 8080 in the container.
You can also read more about network stanza in the nomad official documentation
Service discovery
Nomad schedules workloads of various types across a cluster of generic hosts. Because of this, placement is not known in advance and you will need to use service discovery to connect tasks to other services deployed across your cluster. Nomad integrates with Consul to provide service discovery and monitoring.
A service stanza can be added to your job spec, to enable service discovery.
The service stanza instructs Nomad to register a service with Consul.
Tests
If you are running the tests locally, use the vagrant VM provided in the repository.
$ vagrant up
$ vagrant ssh containerd-linux
$ sudo make test
NOTE: These are destructive tests and can leave the system in a changed state.
It is highly recommended to run these tests either as part of a CI/CD system e.g. circleci or on
a immutable infrastructure e.g vagrant VMs.
You can also run an individual test by specifying the test name. e.g.
$ cd tests
$ sudo ./run_tests.sh 001-test-redis.sh
Cleanup
make clean
This will delete your binary: containerd-driver
vagrant destroy
This will destroy your vagrant VM.
Currently supported environments
Ubuntu (>= 16.04)
License
Copyright 2020 Roblox Corporation
Licensed under the Apache License, Version 2.0 (the "License"). For more information read the License.